With the
z-transform , the s-plane represents a set of signals (
complex exponentials ). For
any given
LTI system,
some of these signals may cause the output of the system toconverge, while others cause the output to diverge ("blow up").
The set of signals that cause the system's output to convergelie in the
region of convergence (ROC) . This
module will discuss how to find this region of convergence forany discrete-time, LTI system.
The region of convergence
The region of convergence, known as the
ROC , is
important to understand because it defines the region wherethe
z-transform exists. The
z-transform of a sequence is defined as
The ROC for a given
, is defined as the range of
for which the z-transform converges. Since the z-transform is
a
power series , it converges when
is absolutely summable. Stated differently,
must be satisfied for convergence.
Properties of the region of convergencec
The Region of Convergence has a number of properties that are
dependent on the characteristics of the signal,
.
The ROC cannot contain any poles. By definition a pole is a where
is infinite.
Since
must be finite for all
for
convergence, there cannot be a pole in the ROC.
If
is a finite-duration sequence, then the ROC is the
entire z-plane, except possibly
or
. A
finite-duration sequence is a sequence that
is nonzero in a finite interval
.As long as each value of
is finite then the sequence will be absolutely summable.
When
there will be a
term and thus the ROC will not include
.
When
then the sum will be infinite and thus the ROC will not
include
.
On the other hand, when
then the ROC will include
,
and when
the ROC will include
.
With these constraints, the only signal, then, whose ROCis the entire z-plane is
.
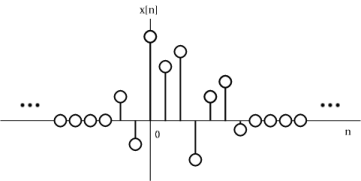
An example of a finite duration sequence.
The next properties apply to infinite duration sequences. As
noted above, the z-transform converges when
.
So we can write
We can then split the infinite sum into positive-time and
negative-time portions. So
where
and
In order for
to be finite,
must be bounded. Let us then set
for
and
for
From this some further properties can be derived:
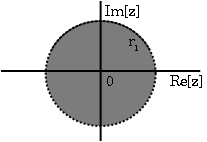
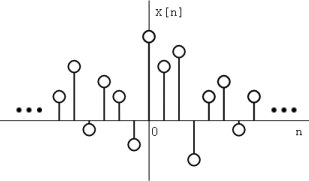
If
is a right-sided sequence, then the ROC extends outward
from the outermost pole in
. A
right-sided sequence is a sequence where
for
.
Looking at the positive-time portion from the abovederivation, it follows that
Thus in order for this sum to converge,
,
and therefore the ROC of a right-sided sequence is of theform
.
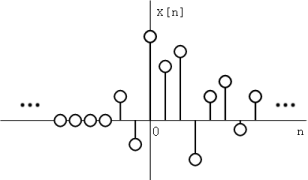
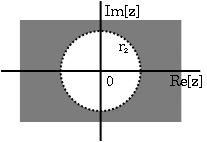
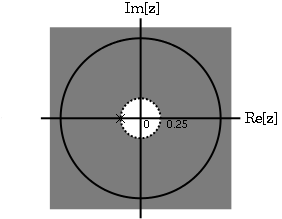
A right-sided sequence.The ROC of a right-sided sequence.
If
is a left-sided sequence, then the ROC extends inward
from the innermost pole in
. A
left-sided sequence is a sequence where
for
.
Looking at the negative-time portion from the abovederivation, it follows that
Thus in order for this sum to converge,
,
and therefore the ROC of a left-sided sequence is of theform
.
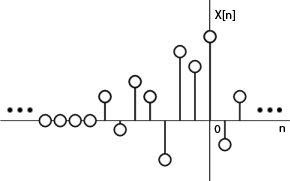
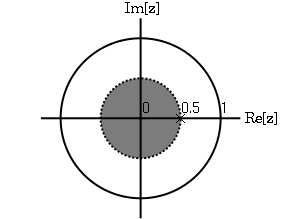
A left-sided sequence.The ROC of a left-sided sequence.
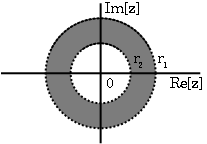
If
is a two-sided sequence, the ROC will be a ring in the
z-plane that is bounded on the interior and exterior bya pole. A
two-sided sequence is an sequence with
infinite duration in the positive and negativedirections. From the derivation of the above two
properties, it follows that if
converges, then both the positive-time and negative-time
portions converge and thus
converges as well. Therefore the ROC of a two-sided
sequence is of the form
.
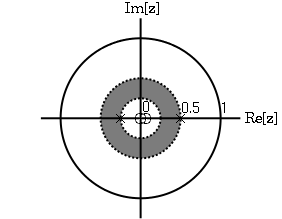
A two-sided sequence.The ROC of a two-sided sequence.
Examples
Lets take
The z-transform of
is
with an ROC at
.
The ROC of
The z-transform of
is
with an ROC at
.
The ROC of
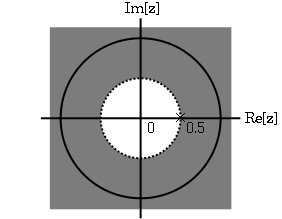
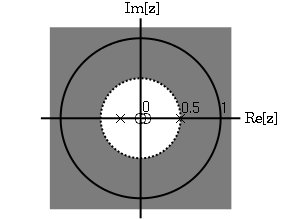
Due to linearity,
By observation it is clear that there are two zeros, at
and
,
and two poles, at
,and
.
Following the obove properties, the ROC is
.
The ROC of
Using the demonstration, learn about the region of convergence for the Laplace Transform.
Conclusion
Clearly, in order to craft a system that is actually useful by virtue of being causal and BIBO stable, we must ensure that it is within the Region of Convergence, which can be ascertained by looking at the pole zero plot. The Region of Convergence is the area in the pole/zero plot of the transfer function in which the function exists. For purposes of useful filter design, we prefer to work with rational functions, which can be described by two polynomials, one each for determining the poles and the zeros, respectively.