

| << Chapter < Page | Chapter >> Page > |
Muscles, bones, and joints are some of the most interesting applications of statics. There are some surprises. Muscles, for example, exert far greater forces than we might think. [link] shows a forearm holding a book and a schematic diagram of an analogous lever system. The schematic is a good approximation for the forearm, which looks more complicated than it is, and we can get some insight into the way typical muscle systems function by analyzing it.
Muscles can only contract, so they occur in pairs. In the arm, the biceps muscle is a flexor—that is, it closes the limb. The triceps muscle is an extensor that opens the limb. This configuration is typical of skeletal muscles, bones, and joints in humans and other vertebrates. Most skeletal muscles exert much larger forces within the body than the limbs apply to the outside world. The reason is clear once we realize that most muscles are attached to bones via tendons close to joints, causing these systems to have mechanical advantages much less than one. Viewing them as simple machines, the input force is much greater than the output force, as seen in [link] .
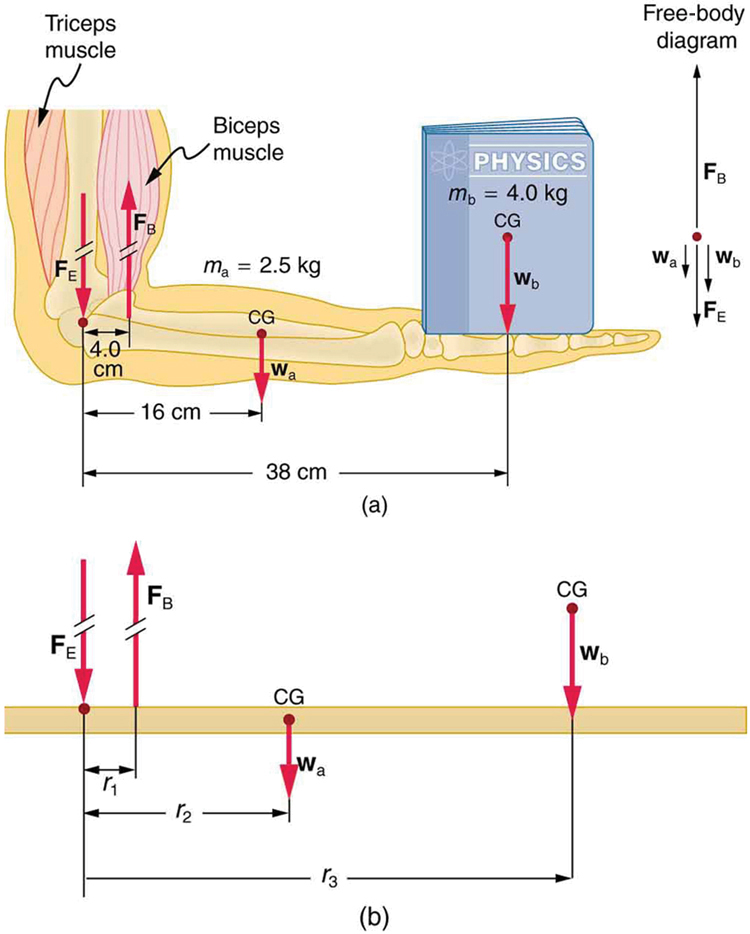
Calculate the force the biceps muscle must exert to hold the forearm and its load as shown in [link] , and compare this force with the weight of the forearm plus its load. You may take the data in the figure to be accurate to three significant figures.
Strategy
There are four forces acting on the forearm and its load (the system of interest). The magnitude of the force of the biceps is ; that of the elbow joint is ; that of the weights of the forearm is , and its load is . Two of these are unknown ( and ), so that the first condition for equilibrium cannot by itself yield . But if we use the second condition and choose the pivot to be at the elbow, then the torque due to is zero, and the only unknown becomes .
Solution
The torques created by the weights are clockwise relative to the pivot, while the torque created by the biceps is counterclockwise; thus, the second condition for equilibrium becomes
Note that for all forces, since for all forces. This equation can easily be solved for in terms of known quantities, yielding
Entering the known values gives
which yields
Now, the combined weight of the arm and its load is , so that the ratio of the force exerted by the biceps to the total weight is
Discussion
This means that the biceps muscle is exerting a force 7.38 times the weight supported.
Notification Switch
Would you like to follow the 'Une: physics for the health professions' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|