

| << Chapter < Page | Chapter >> Page > |
Một cách tổng quát, một hệ điều khiển tốt sẽ phải rất nhạy đối với sự biến đổi của các thông số này để có thể giữ vững đáp ứng ra.
Xem lại hệ thống ở (H.1_9). Ta xem G như là một thông số có thể thay đổi. Độ nhạy toàn hệ thống được định nghĩa như sau:
(1.3)
M: độ lợi toàn hệ thống.
Trong đó: M chỉ sự thay đổi thêm của M
G.M/M và G/G chỉ phần trăm thay đổi của M và G. Ta có:
(1.4)
Hệ thức này chứng tỏ hàm độ nhạy có thể làm nhỏ tuỳ ý bằng cách tăng GH, miễn sao hệ thống vẫn giữ được sự ổn định.
Trong một hệ vòng hở, độ lợi của nó sẽ đáp ứng kiểu một - đối - một đối với sự biến thiên của G.
Một cách tổng quát, độ nhạy toàn hệ thống của một hệ hồi tiếp đối với những biến thiên của thông số thì tuỳ thuộc vào nơi của thông số đó. Người đọc có thể khai triển độ nhạy của hệ thống (H.1_9) theo sự biến thiên của H.
d) Hiệu quả hồi tiếp đối với nhiễu phá rối từ bên ngoài.
Trong suốt thời gian hoạt động, các hệ thống điều khiển vật lý chịu sự phá rối của vài loại nhiễu từ bên ngoài. Thí dụ, nhiễu nhiệt (thermal noise) trong các mạch khuếch đại điện tử, nhiễu do tia lửa điện sinh từ chổi và cổ góp trong các động cơ điện …
Hiệu quả của hồi tiếp đối với nhiễu thì tuỳ thuộc nhiều vào nơi mà nhiễu tác động vào hệ thống. Không có kết luận tổng quát nào. Tuy nhiên, trong nhiều vị trí, hồi tiếp có thể giảm thiểu hậu quả của nhiễu.
Xem hệ thống ở (H.1_11)
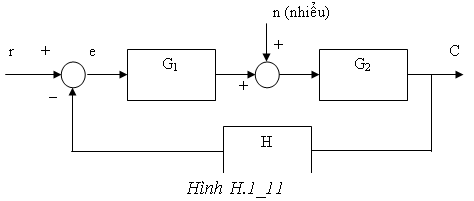
Ouput của hệ có thể được xác định bằng nguyên lý chồng chất (super position)
(1 - 5)- Nếu không có hồi tiếp, H = 0 thì output
Tỷ số tín hiệu trên nhiễu (signal to noise ratio) được định nghĩa:
(1.6)
Để tăng tỷ số S/N hiển nhiên là phải tăng G1 hoặc e/n. Sự thay đổi G2 không ảnh hưởng đến tỷ số.
- Nếu có hồi tiếp, output của hệ thống khi r và n tác động đồng thời sẽ là :
(1.7)
So sánh (1.5) và (1.7), ta thấy thành phần do nhiễu của (1.7) bị giảm bởi hệ số 1+ G1G2 H. Nhưng thành phần do tín hiệu vào cũng bị giảm cùng một lượng.
Tỷ số S/N bây giờ là:
(1.8)
Và cũng bằng như khi không có hồi tiếp. Trong trường hợp này, hồi tiếp không có hiệu quả trực tiếp đối với tỷ số S/N của hệ thống. Tuy nhiên , sự áp dụng hồi tiếp làm nảy ra khả năng làm tăng tỷ số S/N dưới vài điều kiện. Giả sử rằng suất G1 tăng đến G1’và r đến r’, các thông số khác không thay đổi , output do tín hiệu vào tác độïng riêng (một mình) thì cũng bằng như khi không có hồi tiếp. Nói cách khác ta có :
(1.9)
Với sự tăng G1, G1’ output do nhiễu tác đôïng riêng một mình sẽ là:
(1.10)
Nhỏ hơn so với khi G1 không tăng. Bây giờ tỷ số S/N sẽ la:ø
(1.11).
Nhận thấy nó lớn hơn hệ thống không hồi tiếp bởi hệ số (1+ G1’G2H)
Một cách tổng quát, hồi tiếp cũng gây hiệu quả trên các tính chất của hệ thống, như độ rộng dãy tần, tổng trơ,û đáp ứng quá độ ( Transient Response) và đáp ứng tần số.
Có nhiều cách phân loại hệ thống điều khiển.
Notification Switch
Would you like to follow the 'Cơ sở tự động học' conversation and receive update notifications?

|
|

|
|
|
|
|

|
|

|
|

|
|

|
|

|
|

|
|
|
|