

| << Chapter < Page | Chapter >> Page > |
For example, below we have a simplified example of Frequency Shift Keying (FSK) where we having the following coding for '1' and '0':
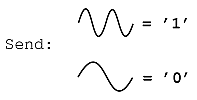
Based on the above coding, we can create digital signals based on 0's and 1's by putting together the above two"codes" in an infinite number of ways. For this example we will transmit a basic 3-bit number, 101, which isdisplayed in [link] :

Now, the signal picture above represents our original signal that will be transmitted over some communicationsystem, which will inevitably pass through the "communications channel," the part of the system that willdistort and alter our signal. As long as the noise is not too great, our matched filter should keep us from havingto worry about these changes to our transmitted signal. Once this signal has been received, we will pass the noisysignal through a simple system, similar to the simplified version shown in [link] :
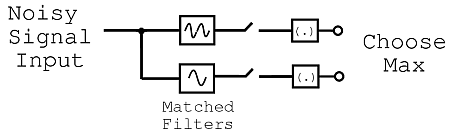
[link] basically shows that our noisy
signal will be passed in (we will assume that it passes inone "bit" at a time) and this signal will be split and
passed to two different matched filter detectors. Eachone will compare the noisy, received signal to one of the
two codes we defined for '1' and '0.' Then this valuewill be passed on and whichever value is higher
(
The interactive example below supposes that our transmitter sends 1000 bits, plotting how many of those bits are received and interpreted correctly as either 1s and 0s, and also keeps a tally of how many are accidentally misinterpreted. You can play around with the distance between the energy of the "1" and the "0" (discriminability), the degree of noise present in the channel, and the location of the criterion (threshold) to get a feel for the basics of signal detection theory.
Let's use a matched filter to find the "0" bits in a simple signal.
Let's use the signal from example 1 to represent the bits. represents 0, while represents 1.
for
for
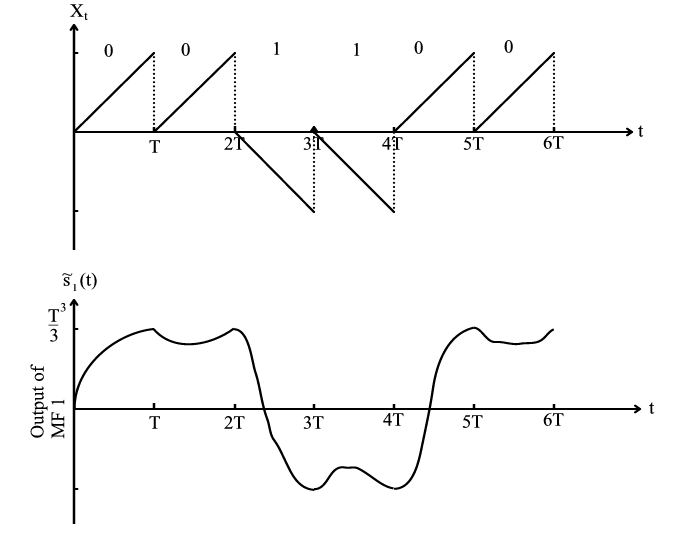
The matched filter output clearly shows the location of the "0" bits.
One of the first, and more intriguing forms of communication that used the matched filter concept was radar. A known electromagnetic signal is sent out by a transmitter at a target and reflected off of the target back to the sender with a time delay proportional to the distance between target and sender. This scaled, time-shifted signal is then convolved with the original template signal, and the time at which the output of this convolution is highest is noted.
This technology proved vital in the 1940s for the powers that possessed it. A short set of videos below shows the basics of how the technology works, its applications, and its impact in World War 2.
History of radar
See the video in [link] for an analysis of the same basic principle being applied to adaptive cruise control systems for the modern car.
As can be seen, the matched filter detector is an important signal processing application, rich both in theoretical concepts and in practical applications. The matched filter supports a wide array of uses related to pattern recognition, including image detection, frequency shift keying demodulation, and radar signal interpretation. Despite this diversity of purpose, all matched filter applications operate in essentially the same way. Every member of some set of signals is compared to a target signal by evaluating the absolute value of the inner product of the the two signals after normalization. However, the signal sets and result interpretations are application specific.
Notification Switch
Would you like to follow the 'Signals and systems' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|
|