

| << Chapter < Page | Chapter >> Page > |
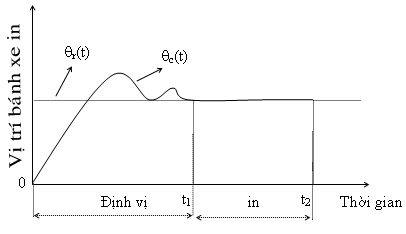
H.1_8: Input và output của sự điều khiển bánh xe in.
Hình H.1_8 trình bày input và output tiêu biểu của hệ thống. Khi một lệnh tham khảo được đưa vào (gõ bàn phím), tín hiệu được trình bày như một hàm nấc (step function). Vì mạch điện của motor có cảm kháng và tải cơ học có quán tính, bánh xe in không thể chuyển động đến vị trí mong muốn ngay tức khắc. Nó sẽ đáp ứng như hình vẽõ và đến vị trí mới sau thời điểm t1. Từ 0 đến t1 là thời gian định vị. Từ t1 đến t2 là thời gian in. Sau thời điểm t2, hệ thống sẵn sàng nhận một lệnh mới.
Trong những thí dụ ở trên, việc sử dụng hồi tiếp chỉ với chủ đích thật đơn giản, để giảm thiểu sự sai biệt giữa tiêu chuẩn tham khảo đưa vào và tín hiệu ra của hệ thống. Nhưng, những hiệu quả có ý nghĩa của hồi tiếp trong các hệ thống điều khiển thì sâu xa hơn nhiều. Sự giảm thiểu sai số cho hệ thống chỉ là một trong các hiệu quả quan trọng mà hồi tiếp có tác động lên hệ thống.
Phần sau đây, ta sẽ thấy hồi tiếp còn tác động lên những tính chất của hệ thống như tính ổn định, độ nhạy, độ lợi, độ rộng băng tần, tổng trở.
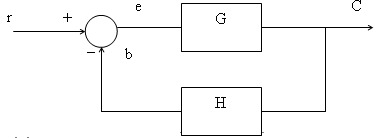
H.1_9: Hệ thống có hồi tiếp.
Xem một hệ thống có hồi tiếp tiêu biểu như (H.1_9). Trong đó r là tín hiệu vào. C là tín hiệu ra. G và H là các độ lợi.
(1.1)
a) Hiệu quả của hồi tiếp đối với độ lợi toàn thể (overall Gain).
So với độ lợi của hệ vòng hở (G), độ lợi toàn thể của hệ vòng kín (có hồi tiếp) có thêm hệ số 1+GH. Hình H.1_9 là hệ thống hồi tiếp âm, tín hiệu hồi tiếp b có dấu (-).
Lượng GH tự nó có thể bao gồm dấu trừ. Do đó, hiệu quả tổng quát của hồi tiếp là làm tăng hoặc giảm độ lợi. Trong một hệ điều khiển thực tế, G và H là các hàm của tần số f. Suất có thể lớn hơn 1 trong một khoảng tần số nào đó và nhỏ hơn 1 ở một khoảng tần số khác . Như vậy, hồi tiếp sẽ làm tăng độ lợi hệ thống trong một khoảng tần số nhưng làm giảm nó ở khoảng tần số khác.
b) Hiệu quả của hồi tiếp đối với tính ổn định.
Nói một cách khác không chặt chẽ lắm, một hệ thống gọi là bất ổn khi output của nó thoát khỏi sự kiểm soát hoặc là tăng không giới hạn.
Xem phương trình (1.1). nếu GH = -1, output của hệ thống sẽ tăng đến vô hạn đối với bất kỳ input hữu hạn nào. Như vậy, có thể nói rằng hồi tiếp có thể làm một hệ thống (mà lúc đầu ổn định) trở nên bất ổn. Hồi tiếp là một thanh gươm 2 lưỡi. Nếu dùng không đúng cách, nó sẽ trở nên tai hại. Nhưng cũng có thể chứng tỏ được rằng, mối lợi của hồi tiếp lại là tạo được sự ổn định cho một hệ thống bất ổn.
Giả sử hệ thống hồi tiếp ở (H.1_9) bất ổn vì GH = -1. Bây giờ, nếu ta đưa vào một vòng hồi tiếp âm nữa, như (H.1_10) .
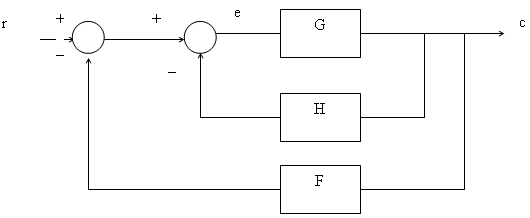
Độ lợi toàn thể của hệ thống bây giờ sẽ là :
(1.2)
Nếu do những tín chất của G và H làm cho vòng hồi tiếp trong bất ổn, vì G.H = -1. nhưng toàn thể hệ thống có thể vẫn ổn định bằng cách chọn lựa độ lợi F của vòng hồi tiếp ngoài.
c) Hiệu quả của hồi tiếp đối với độ nhạy. (Sensibility)
Độ nhạy thường giữ một vai trò quan trọng trong việc thiết kế các hệ thống điều khiển. Vì các thành phần vật lý có những tín chất thay đổi đối với môi trường xung quanh và với từng thời kỳ , ta không thể luôn luôn xem các thông số của hệ thống hoàn toàn không đổi trong suốt toàn bộ đời sống hoạt động của hệ thống. Thí dụ, điệân trở dây quấn của một động cơ điện thay đổi khi nhiệt độ tăng trong lúc vận hành.
Notification Switch
Would you like to follow the 'Cơ sở tự động học' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|